
Applications of flexible and stretchable three-dimensional structures for soft electronics


Abstract
The development of devices that can be mechanically deformed in geometrical layouts, such as flexible/stretchable devices, is important for various applications. Conventional flexible/stretchable devices have been demonstrated using two-dimensional (2D) geometry, resulting in dimensional constraints on device operations and functionality limitations. Accordingly, expanding the dimensions in which such devices can operate and acquiring unique functionality that is difficult to implement in 2D planar structures remain challenging. As a solution, the development of a flexible/stretchable device embedding a three-dimensional (3D) structure fabricated through the precise control of a 2D structure or direct construction has been attracting significant attention. Because of a significant amount of effort, several 3D material systems with distinctive engineering properties, including electrical, optical, thermal, and mechanical properties, which are difficult to occur in nature or to obtain in usual 2D material systems, have been demonstrated. Furthermore, 3D advanced material systems with flexibility and stretchability can provide additional options for developing devices with various form factors. In this review, novel fabrication methods and unprecedented physical properties of flexible/stretchable 3D material systems are reviewed through multiple application cases. In addition, we summarized the latest advances and trends in innovative applications implemented through the introduction of advanced 3D systems in various fields, including microelectromechanical systems, optoelectronics, energy devices, biomedical devices, sensors, actuators, metamaterials, and microfluidic systems.
Keywords
INTRODUCTION
The importance of flexible/stretchable devices in next-generation soft electronics such as emerging displays, smart sensors, wearable devices, and wireless communication devices is growing[1-4]. Accordingly, several flexible/stretchable device fabrication technologies have been reported, and these fabrication methodologies produce soft electronic devices that can not only be bent, twisted, or stretched but allow them to be freely transformed into a desired shape[5-8]. In addition to the diversity of device design, various advantages, including ultra-lightweight[9], unbreakability[10], overcoming space constraints[11], and low cost[12] can be realized, and in particular, mechanical stability against deformation caused by human motion or displacement of these devices can be achieved without deterioration in performance[13-15]. Based on the aforementioned superior characteristics, high-functional flexible/stretchable devices such as electronic skin[16], smart fabric[17], and wearable energy harvesters[18] are being developed in various fields, including microelectromechanical systems (MEMS)[19-27], optoelectronics[7,28-38], actuators[39-46] and micro-fluidic systems[47-54].
However, most of the reported flexible/stretchable devices operate with a two-dimensional (2D) planar or stacked device structure, and there are several challenges in the implementation of novel functionality and application to various fields due to the dimensional constraints of the structure. For example, devices that can detect external fields only in small spatial resolutions with one or two dimensions may have difficulty in detecting vector fields in three-dimensional (3D) space, and sensing an in vivo cell with a complex morphology requires a device with a 3D contact surface area. In this regard, several studies have shown that forming or embedding 3D structural components in flexible/stretchable devices can overcome the dimensional limitations of device operations as well as allow for the implementation of fundamentally new properties and functionalities that are difficult to realize with 2D structures in various application fields [Figure 1]. For example, broadband electromagnetic radiation can be achieved by constructing a geometrically reconfigurable 3D mesostructure on a soft substrate[55], allowing the narrowband resonant optical reconfigurations through the transformable optical nano-kirigami[56], and implementing

Figure 1. Diagram of the application of flexible, stretchable, 3D structures for MEMS (Top: Reproduced with permission from Ref.[147]. Copyright© 2019. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. Bottom: Reproduced with permission from Ref.[55]. Copyright© 2020. American Association for the Advancement of Science), LED & photodetector (Right: Reproduced with permission from Ref.[161]. Copyright© 2019. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. Left: Reproduced with permission from Ref.[159]. Copyright© 2021. Springer Nature), energy devices (Top: Reproduced with permission from Ref.[177]. Copyright© 2021. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. Bottom: Reproduced with permission from Ref.[174]. Copyright© 2022. American Chemical Society), biomedical devices (Top: Reproduced with permission from Ref.[191]. Copyright© 2019. American Association for the Advancement of Science. Bottom: Reproduced with permission from Ref.[196]. Copyright© 2021. American Association for the Advancement of Science), sensors (Top: Reproduced with permission from Ref.[205]. Copyright© 2019. American Chemical Society, Bottom: Reproduced with permission from Ref.[208]. Copyright© 2020. American Association for the Advancement of Science), actuators (Top: Reproduced with permission from Ref.[219]. Copyright© 2022. American Association for the Advancement of Science. Bottom: Reproduced with permission from Ref.[221]. Copyright© 2022. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim), metamaterials (Top: Reproduced with permission from Ref.[57]. Copyright© 2022. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. Bottom: Reproduced with permission from Ref.[56]. Copyright© 2021. Springer Nature), and microfluidic systems (Top: Reproduced with permission from Ref.[236]. Copyright© 2011.
In this review, we first briefly discuss representative manufacturing methods of 3D structures, and introduce the implementation of MEMS capable of unique functions or multimodal operations by rearranging 3D structures such as antennas and sensors in the second section. The third section describes light-emitting diodes (LEDs) and photodetectors, which can achieve operational stability against deformation or overcome spatial constraints by using 3D architectures. In the next section (fourth section), we introduce energy devices such as energy harvesters and batteries that can achieve high performance with high surface areas and electrochemical stability resulting from the formation of 3D structures. Then, the fifth section discusses a methodology for fabricating 3D structures that exquisitely mimic biological tissues and tiny biomedical devices that can accurately monitor the physiological properties of 3D biological systems. The sixth section covers several sensors that detect various factors such as temperature, strain, and magnetic field and achieve spatial expansion of the sensing area through 3D geometry. The seventh section introduces 3D actuators that can perform unique movements or behaviors within a 3D space in response to multiple external stimuli, and metamaterials that exhibit unique physical behaviors through elaborately designed geometries in 3D are discussed in the eighth section. In the ninth section, we cover 3D flexible/stretchable microfluidic systems obtained by introducing soft materials into the fabrication process of 3D complex networks. Finally, the challenges and opportunities of flexible/stretchable devices with 3D structures are discussed.
Manufacturing method for 3D structures
There is a need for innovative hardware fabrication concepts or platforms in order to realize highly functional flexible/stretchable devices composed of 3D structures with feature sizes from the micro to the macroscale. In this regard, several efforts have been made to fabricate 3D structures to create extremely high device performances or unique functionalities that cannot be achieved with existing 2D devices[58-69]. There is a method for converting a 2D structure into a 3D structure by mechanically guiding the assembly (buckling)[70-75], folding (origami)[76-78], or cutting (kirigami)[79-84] a 2D structure along a predesigned pattern, as well as directly fabricating the desired 3D structure (3D printing) [Figure 2][85-87]. The assembly processes for the aforementioned 3D structure manufacturing methods are detailed below, along with material availability, unique structural features, and design and manufacturing advantages of each method. In terms of material availability, methods such as mechanically-guided assembly, origami, and kirigami, which produce 3D structures by transforming and assembling 2D structures, can be applied to nearly all types of advanced materials, including metals, semiconductors and polymers. The 3D printing method has generally focused on conductive ink with optimized rheology and incorporates various types of materials. Furthermore, it is necessary to discuss the unique structural features of each method, which are closely related to the device’s function. The mechanically-guided assembly is characterized by a deformable substrate. Origami and kirigami have foldable creases, while 3D printing has a relatively high degree of structural freedom. Next, the design and manufacturing advantages of each method are discussed. A mechanically-guided assembly could be introduced to multilayer 2D precursors to obtain a dense and complex 3D architecture with overlaid layouts and entanglement points. Both origami and kirigami methods, though primarily through kirigami’s reduction in stress concentration, facilitate control of curves and provide high design flexibility. 3D printing has the advantages of programmability, scalability, and low entry barriers in the fabrication of soft electronics. By carefully applying these 3D structure manufacturing methods with unique characteristics in the right places, 3D structures have been incorporated into various application fields, such as energy-harvesting[88-95], biomedical[96-106], sensors[107-116], and metamaterials[117-121].

Figure 2. (A) Schematic illustration of the mechanically-guided assembly process. (Reproduced with permission from Ref.[63].
Mechanically-guided assembly
The mechanically-guided assembly has been studied as a precise and well-controlled 2D-3D conversion method that can extend geometry to 3D while maintaining compatibility with 2D microsystem technology. Figure 2A shows the mechanical assembly process of a 3D structure consisting of three key steps: precursor production, transfer printing, and mechanical buckling. This process begins by manufacturing 2D precursors through general lithography techniques on source wafers or other planar substrates. Selective bonding sites and sacrificial layers are formed through sputtering or deposition technologies. The 2D precursor is then transferred to a pre-stretched elastomer substrate through a transfer printing process using a polydimethylsiloxane (PDMS) stamp or water-soluble tape to induce strong covalent bonding of the contact sites. Finally, by releasing the compression applied to the elastomer substrate, which serves as a platform to provide the mechanical force needed to drive the 3D assembly, the 2D precursor is converted to a precisely-designed 3D geometry through spatial deformation, in-plane/out-of-plane conversion, and rotational motion. This assembly process is expected to produce various 3D structures with unique architecture and functions by controlling key factors that affect the assembly, such as changing the 2D layout of the precursor, adjusting the pre-strain characteristics of the assembly substrate, and patterning for selective bonding.
Origami and kirigami
Origami and kirigami, which translate to “paper folding” and “paper cutting,” are methods of converting 2D flat objects into 3D structures using “folding” and “cutting” as basic processes, respectively. Although many studies do not establish a clear boundary between origami and kirigami, “folding” is a common feature of the two methodologies. These methods can modify the shapes of various materials, such as metals, polymers, hydrogels, graphene, and paper, from the macroscale to the nanoscale. As shown in Figure 2B, the origami structure is typically folded to a compressed volume compared to the initial state, while the kirigami structure has an expanded configuration from the initial state. In addition, a hybrid
3D printing
3D printing encompasses a wide range of light- and ink-based printing technologies that enable the digital design and production of 3D objects, and mainly focuses on rapid prototyping. 3D printing typically moves the laser optics or ink-based pattern generation head to create an object layer by layer, and the pattern area consisting of resin, powder, or ink is solidified to generate a desired 3D shape during the printing process. Various 3D printing technologies have been reported[122-124], and Figure 2C shows representative examples. Light-based 3D printing technology uses light to sculpt objects through stereolithography (SLA) of photocurable resin or selective laser sintering (SLS) of polymer powder. Photocurable resin-based 3D printing technology combines ink-based printing and light-based printing into one platform, creating structures through the polymerization of photocurable resin via exposure to ultraviolet light sources. Finally, direct ink writing is a method of immediately drawing a desired shape through the direct injection of viscoelastic materials under ambient conditions. 3D printing technology is gaining attention as a suitable methodology to produce 3D structures according to user orders. Continuous development of 3D printing methods capable of high speeds, high precision, mass production, and high degrees of freedom in the printing materials are expected to produce high-performance devices for a wide range of applications, including sensors, actuators, and electronics.
Microelectromechanical systems
With the demand for the miniaturization of devices, Microelectromechanical systems (MEMS), a multifunctional component that can simultaneously perform different roles such as sensors, electronic circuits, and actuators, have made significant progress[125-127]. In particular, the integration of 2D MEMS with flexible/stretchable substrates has shown the possibility of implementing deformable soft electronic devices in various fields, including biomedical technology[128], optical devices[129], and the Internet of Things[130]. In addition to this design diversity, high-functionalities such as customizable telecommunication and frequency reconfiguration are required to expand the application area, and additional advantages can be provided by embedding geometrically complex 3D microstructures in MEMS. Thus far, several methodologies for installing electronic components in 3D complex morphology, particularly on a millimeter to micrometer scale, on flexible/stretchable boards have been proposed. Representative examples include buckling methods that transform 2D precursors into 3D structures through physical deformation[131-135] and origami/kirigami that obtains a desired shape by cutting or folding materials[136-142]. This chapter introduces various studies on the fabrication of 3D MEMS devices that can operate in multiple states/modes through mechanical reconfigurations [Figure 3].

Figure 3. (A) 3D morphable mesostructures as switchable radio frequency electronic components with shielding capability. (Reproduced with permission from Ref.[143]. Copyright© 2018. Springer Nature); (B) image of 4-by-4 interconnected helical 3D arrays with integrated micro LEDs, heaters, thermistors, and electrodes. (Reproduced with permission from Ref.[51]. Copyright© 2021. American Association for the Advancement of Science); (C) partially and fully folded 3D mesoscale saddle structures formed from a 2D copper precursor of concentric circles. (Reproduced with permission from Ref.[144]. Copyright© 2022. American Association for the Advancement of Science); (D) different bonding modes of 3D bilayer PI sheets consisting of two cross PI ribbons. (Reproduced with permission from Ref.[145]. Copyright© 2021. American Chemical Society); (E) images of 3D buckled structure in the shape of a table with different compressive strains. (Reproduced with permission from Ref.[146]. Copyright© 2019. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (F) mechanically stable and electrically tunable hemispherical small antennas. (Reproduced with permission from Ref.[147]. Copyright© 2019. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (G) a multimodal antenna consisting of four pairs of reconfigurable components. (Reproduced with permission from Ref.[55]. Copyright© 2020. American Association for the Advancement of Science)
Fu et al. demonstrated a reconfigurable 3D radiofrequency electromagnetic device that can be deformed in different time sequences via nonlinear mechanical buckling [Figure 3A][143]. The antennas are elevated and exposed in the working mode, and then, the reconfiguration of the system allows the coil to be hidden by the metallic support and electromagnetically shielded. Electronic components that can be switched to different states through reversible shape changes highlight their potential for use in advanced communication devices. Luan et al. demonstrated a double-floor helical-shaped 3D microfluidic mesostructure integrated with electronic components such as micro LEDs, heaters, thermistors, and electrodes [Figure 3B][51]. The 3D hybrid system could withstand various types of elastic deformation, including bending and twisting, through the selective bonding technique. 3D structures capable of physical deformation and endowed with electronic sensing and regulating functions can achieve systematic microvascular networks. Zhang et al. reported an origami-based microfolding strategy that enables the formation of 3D morphable microelectronic systems using a wide range of material classes, including single crystalline silicon, metallic nanomembranes, and polymers [Figure 3C][144]. Based on computational modeling, they predesigned a folding host and constructed a folding pathway to fabricate a freestanding 3D mesostructure with modulatory functionality and a complex configuration. This demonstrated the development of miniaturized electronic devices for customizable telecommunication, which have significant applicability in scenarios of limited design space and deformable carriers by fabricating mesoscale 3D antennas with various folded states. Chen et al. reported that a 3D electronic device can be reconstructed using the solvent-driven bistable structure of a silicon-oil extracted poly(dimethylsiloxane) (PDMS) sheet, which acts as a substrate [Figure 3D][145]. The PDMS substrate exhibited snap-through and snap-back behaviors by solvent stimulation, resulting in various bonding modes of the kirigami polyimide (PI) sheet adhered to PDMS. A frequency-reconfigurable small monopole antenna driven by a bistable substrate was presented as an application. Humood et al. fabricated polymer-based kirigami microscale structures and investigated the mechanical stability of various 3D architectures by confirming the resilient behavior for cyclically applied compression under different forces [Figure 3E][146]. The mechanical response of the 3D structures was confirmed to be stable and recoverable when compressed up to 50% of their initial height, and permanent changes in internal stress and curvature occur under extreme compression of 100%. With a deep understanding of the compressive behavior of kirigami-based soft MEMS devices, guidelines are presented to eliminate crack growth, which is critical for the fabrication of MEMS devices, including pressure and shear sensors. Liu et al. introduced a mechanically induced 3D assembly approach for the design and fabrication of high-quality meanderline-based hemispherical small antennas [Figure 3F][147]. External tensile strains were applied to reshape the elastomeric substrates and reversibly tune the wide range of center frequencies to adapt to changes in environmental conditions. The demonstration of a small antenna system whose frequency is tunable over a wide range and capable of maintaining high levels of mechanical strain suggests promising potential applications in many applications, including wireless wearables and bio-integrated electronics. Finally, Bai et al. fabricated a multimodal antenna capable of customizing distinct beamforming and discrete beam scanning [Figure 3G][55]. They demonstrated approximately 30 reconfigurable mesostructures with diverse geometric topologies by mechanically guiding the simplest ribbon geometries. Reconfigurable single antennas can replace array antennas to realize miniaturized and smart wireless devices and can be useful in cases with limited design space.
Light-emitting diode and photodetector
Optoelectronics aims to develop devices that enable the sourcing, detection, and control of light, and it shares its strategic importance by being interdependent with various fields such as electronics[148], information technology[149-152], and computer technology[153]. Accordingly, many efforts have been made to develop 2D flexible/stretchable optoelectronic devices with strict mechanical criteria to maintain electrical and optical properties despite mechanical deformation under various conditions[5,7,154]. In addition to these efforts, the construction of complex 3D optoelectronic systems has provided qualitatively improved performance, and it is possible to realize an efficient and highly functional optoelectronic device by designing an architecture similar to that of 3D systems commonly seen around, including biology or organism. Several methodologies have been proposed to implement 3D optoelectronic devices, and representative methods include buckling, which can expand the space between optoelectronic component pixels by stretching or shrinking elastomeric substrates[155], and the kirigami method, which can fold and convert 2D structures into 3D structures[156]. In this chapter, we introduce recent advances in the fabrication method and application of stretchable and flexible 3D optoelectronic devices [Figure 4].

Figure 4. (A) Shape recovery behavior of 3D LED device before deformation and after load removal. (Reproduced with permission from Ref.[157]. Copyright© 2019. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (B) 3D hemispherical MoS2 photodetectors with interconnection. (Reproduced with permission from Ref.[158]. Copyright© 2018. Springer Nature); (C) operation of 3D display pixel arrays in a bent state by mechanical deformation. (Reproduced with permission from Ref.[155]. Copyright© 2022. Elsevier); (D) 3D architectures of QLED transformed from pre-programmed 2D planar device. (Reproduced with permission from Ref.[159]. Copyright© 2021. Springer Nature); (E) 2D and 3D configurations of light emitting system under cooling and heating of liquid crystal elastomer substrate. (Reproduced with permission from Ref.[160]. Copyright© 2021. American Chemical Society); (F) freestanding 3D LED with wireless power transmission capability on a leaf. (Reproduced with permission from Ref.[161]. Copyright© 2019. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (G) strain-insensitive graphene-based photodetection device under stretching and twisting. (Reproduced with permission from Ref.[156]. Copyright© 2020. Elsevier).
Wang et al. fabricated a mechanically stable 3D wireless LED device using a shape memory polymer (SMP), a means to achieve a robust 3D framework [Figure 4A][157]. The recovery capability and programmability of the SMP provide novel routes to design freestanding 3D mesostructures and programmable microdevices. Furthermore, when the external force along the out-of-plane direction is applied to the LED device and removed using tweezers, the original shape is restored without noticeable damage, exhibiting essential mechanical robustness for various applications. Lee et al. demonstrated a mechanically assembled 3D photodetection and optical imaging system that enabled the measurements of the direction, intensity, and angular divergence properties of incident light [Figure 4B][158]. Based on the mechanics of ultra-thin graphene and MoS2, MoS2/graphene photodetector arrays were realized with origami-inspired complex 3D shapes such as an octagonal prism, an octagonal prismoid, and a hemisphere. The resulting system could track the direction and intensity of incident light through a 3D architecture, and the atomically thin MoS2 and graphene could fabricate optically transparent devices to detect light passing through the device at two sensing positions. Lee et al. demonstrated an origami/kirigami-inspired LED array that can preserve the original image quality under stretching [Figure 4C][155]. The deformable LED pixel array can be stretched up to 100% without the deterioration of device performance by integration with a transparent epoxy frame. The 3D stretchable display is expected to improve the maximized space efficiency of electronic products whose sizes vary depending on their intended use. Kim et al. fabricated 3D foldable quantum dot LED (QLED) using laser patterning and metal etch-stop layers [Figure 4D][159]. The pre-programmed QLED paper transforms by controlled folding under external compressive forces. 3D electronic paper will not only be used for unconventional information displays and 3D decorative lighting but will also be a way to provide a new display form factor that can deliver realistic 3D information. Li et al. demonstrated a reconfigurable LED system utilizing the reversible shape-switching behavior of liquid crystal elastomer substrates
Energy devices
As microsystems become wireless and perform power-consuming tasks, the importance of microenergy devices capable of energy generation and storage in micro-autonomous systems is increasing. Although many energy-harvesting platforms such as solar cells[13,162,163], batteries[164-166], photovoltaic cells[167,168] and triboelectric devices[169,170] have made impressive progress in performance, further improvements in shape deformability and mechanical/electrochemical stability against deformation are required for a wide application. In this regard, the implementation of an energy device with a complex and hierarchical 3D geometry can achieve excellent mechanical properties and stable operations even under extreme deformation. It can also increase the areal capacity, surface area accessibility, and charge/discharge speed rate[171]. Considerable efforts have been made to achieve these improvements, and various manufacturing concepts of energy harvesters applicable to 3D structures with various forms are introduced in this chapter [Figure 5].

Figure 5. (A) 3D serpentine array for energy harvesting from multidirectional vibrations. (Reproduced with permission from Ref.[172]. Copyright© 2019. Springer Nature); (B) stretching behavior of kirigami-cut PVDF film and finite element analysis for application design. (Reproduced with permission from Ref.[173]. Copyright© 2022. Springer Nature); (C) 3D printed MXene aerogel with hollow octet truss architecture for capacitors. (Reproduced with permission from Ref.[174]. Copyright© 2022. American Chemical Society); (D) reconfiguration of electrochemically driven micro-architecture out-of-plane buckling. (Reproduced with permission from Ref.[175]. Copyright© 2019. Springer Nature); (E) stretchable 3D thin-film TEG by kirigami cuts. (Reproduced with permission from Ref.[176]. Copyright© 2022. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (F) organic solar cell-integrated 3D table array under magnetic controlled state. (Reproduced with permission from Ref.[177]. Copyright© 2021. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (G) kirigami-inspired windmill-like structures with laser-induced cellular graphene for solid-state electrolyte supercapacitor. (Reproduced with permission from Ref.[178]. Copyright© 2018. American Chemical Society); (H) unfolding and folding of photo-microreactor under light irradiation and humidified environment. (Reproduced with permission from Ref.[179]. Copyright© 2022. American Association for the Advancement of Science).
Han et al. demonstrated 3D piezoelectric mesostructures by a controlled, nonlinear buckling process, converting thin films of piezoelectric polymers into sophisticated 3D piezoelectric microsystems
Bio-medical devices
Accurate monitoring of the physiological properties of 3D biological systems can improve our understanding of the evolution and origin of abnormal behaviors or disease states[180,181], as well as the interactions associated with the development of neural systems[182-184]. Furthermore, an in-depth analysis of soft living tissues can serve as the basis for diagnosing and treating diseases[185-187]. Thus, the integration of traditional medical technology and biological systems can establish pathways to improve health and prolong life[188-190]. However, biological systems, including plants (e.g., stems and seeds) and animals (e.g., hearts, brains, and blood vessels), have mostly complex 3D curved surfaces, some with dynamic and time-varying features. Nevertheless, many biomedical technologies have rigid, planar, and 2D shapes, which limit their functional interfaces to localized areas of 3D structures, near the bottom contact surface. In this regard, the development of fabrication approaches to allow conformal contact of biomedical systems with 3D biological surfaces is important for highly reliable information interactions between them. In addition, as physical coupling, it is necessary to enable complex optical/electrical/chemical exchange between abiotic and biological systems. In this chapter, we introduce several studies that have developed 3D biomedical systems and demonstrated various applications such as health monitoring, human-machine interfaces, therapeutic devices, artificial tissues/organs, and basic biomedical research [Figure 6].

Figure 6. (A) Adhesion between bioelectronic devices and biological tissues with photocurable bioelectronics-tissue interface materials. (Reproduced with permission from Ref.[105]. Copyright© 2021. Springer Nature); (B) 3D printed arterial vascular network geometry within a cardiac organ-building block matrix. (Reproduced with permission from Ref.[191]. Copyright© 2019. American Association for the Advancement of Science); (C) ordered assembly of 3D rhomboid microscale structure on the complex non-developable surface. (Reproduced with permission from Ref.[192]. Copyright© 2022. American Association for the Advancement of Science); (D) 2D to 3D transformation of 10 FET arrays capable of interfacing cardiomyocytes. (Reproduced with permission from Ref.[193]. Copyright© 2022. Springer Nature); (E) octopus-shaped cell-laden 3D structures with high aspect ratio legs. (Reproduced with permission from Ref.[194]. Copyright© 2021. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (F) 3D printed biomimetic soft 3D network materials with helical filamentary microstructure and cubic lattice topology. (Reproduced with permission from Ref.[195]. Copyright© 2020. Springer Nature); (G) 3D multifunctional mesoscale framework as an interface to a neural spheroid. (Reproduced with permission from Ref.[196].
Yang et al. demonstrated the stable attachment of millimeter-scale flexible electronic/optoelectronic systems, such as wireless cardiac pacemakers and multielectrode epicardial arrays, to vital internal organs with bioelectronics-tissue interface materials (BTIMs) [Figure 6A][105]. BTIMs are mechanically compliant, conductive, and optically transparent and have chemically controlled bioabsorption rates, allowing them to bond strongly to both device and internal organ surfaces with long-term stability. Skylar-Scott et al. reported a biological manufacturing method of assembling organ-building blocks into living matrices with a high cellular density [Figure 6B][191]. Perfusable vascular channels in living matrices were introduced through 3D bioprinting. They could fabricate the arterial vascular network geometry within a cardiac tissue matrix using a patient-specific, cardiac structural model. Xue et al. assembled a tiny 3D rhomboid ribbon microscale structure with a lateral feature size of a sulcus [Figure 6C][192]. Although the complex sulcus topology exhibited obvious bending/torsional deformation during assemblies of 3D electronic systems, a quantitative mechanical modeling strategy was used to transform curved elastomer substrates into planar or cylindrical configurations. Gu et al. introduced a scalable platform employing a 3D high-performance field effect transistor (FET) array obtained through buckling at predesigned hinge locations of a 2D precursor
Sensors
A sensor is an element that detects various physical/chemical information around it and extracts or processes new information to provide a specific service. It is embedded in various devices depending on the purpose. Accordingly, sensors that can be applied to various types of objects are being actively developed, and many advantages can be obtained by introducing a 3D architecture to the sensor. Sensors that can be applied to non-flat surfaces such as curved surfaces and spheres have been developed through 3D geometric design, and high-performance sensors that exceed human senses such as sight, hearing, and touch can also be realized[198,199]. In addition, a multifunctional sensor capable of simultaneously recording pressure, shear force, and bending, along with sensing targets such as temperature, current, and humidity, based on the deformability of 3D structures, has been proposed[200,201]. Recently, sensing devices with bioinspired sensing capabilities, such as temperature and deep-versus-fine touch contact sensing, have been reported by combining actuators to form complex sensor network systems through 3D printing[202,203]. Along with these developments of functionalities, the 3D arrangement of sensors enables spatiotemporal mapping of responses, improves the integrated density, and can also provide 3D vector field detection. In this chapter, we introduce a high-performance sensor based on 3D structures that can detect various external stimuli [Figure 7].

Figure 7. (A) 3D wireless macroflier for measuring fine dust pollution through light dosimetry. (Reproduced with permission from Ref.[201]. Copyright© 2021. Springer Nature); (B) indirect 3D printed strain sensor with porous lattice architecture for motion monitoring. (Reproduced with permission from Ref.[204]. Copyright© 2021. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (C) electromechanical sensor array for measuring the spatial distribution of external loads. (Reproduced with permission from Ref.[205]. Copyright© 2019. American Chemical Society); (D) micro-origami magnetic sensor array composed of self-folded polymer cube. (Reproduced with permission from Ref.[206]. Copyright© 2022. Springer Nature); (E) hemispherical device with 24 flexible pressure sensors for wind-sensing systems. (Reproduced with permission from Ref.[207]. Copyright© 2022. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (F) convex hemispherical-shaped device with stretchable photodetector array. (Reproduced with permission from Ref.[208]. Copyright© 2020. American Association for the Advancement of Science); (G) 3D mechanically reliable vibration sensor capable of withstanding prolonged fatigue life. (Reproduced with permission from Ref.[209]. Copyright© 2021. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (H) 3D printed network of the horseshoe-shaped microstructure array for pressure sensing. (Reproduced with permission from Ref.[210]. Copyright© 2021. American Chemical Society).
Kim et al. fabricated macro-, meso- and microscale 3D fliers inspired by wind-dispersed seeds using the mechanically guided assembly of 3D mesostructures [Figure 7A][201]. The 3D fliers were designed to be integrated with active electronics and colorimetric sensors to fly without power and gather information across natural environments or city settings. They exhibited significant potential for various applications, including atmospheric monitoring, complementing the conventional gravimetric and optical
Actuators
Actuators, which can perform specific tasks by mimicking behaviors or methods that organisms use to adapt to the environment, are attracting considerable attention for their applicability in many fields, from tools for surgery[211] to transport machines for moving objects[212]. The introduction of precisely controlled 3D structure formation methods, including mechanical buckling, origami, kirigami, and 3D printing methods, into actuator manufacturing enables the implementation of actuators with complex 3D layouts beyond simple structures such as spheres, tubes, rods, and arcs. It has also been reported that these 3D actuators can achieve unique movement and behaviors, including bending, crawling, walking, and rotation, without space constraints[213,214], and the integration with soft materials can improve the performance required for practical applications such as strain, speed, energy efficiency, and repeatability[215,216]. In this chapter, we introduce actuators with 3D architectures that can perform very delicate and complex tasks in several fields, including electronics and robotics [Figure 8].
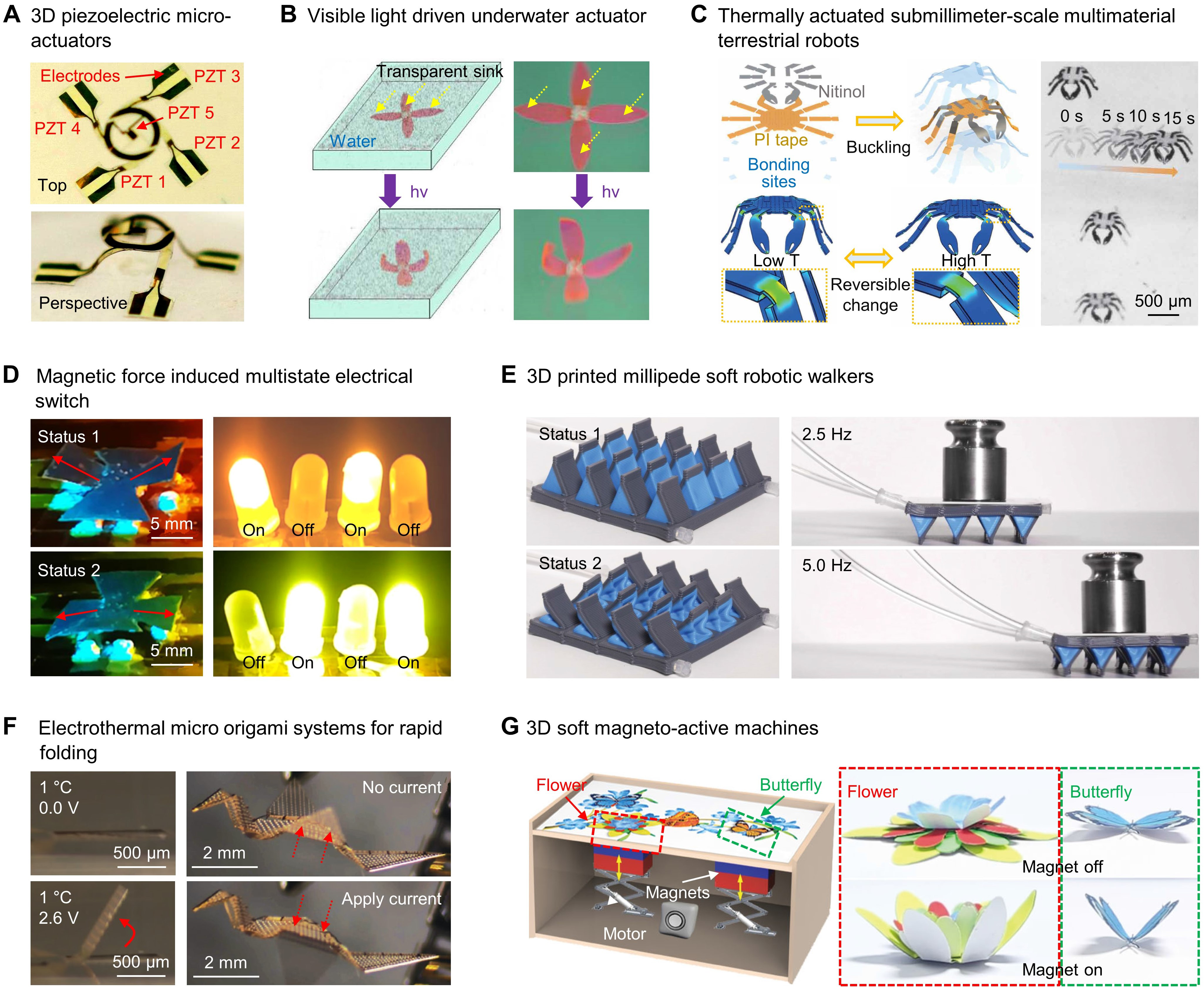
Figure 8. (A) 3D mechanical framework with five independently addressable piezoelectric microactuators. (Reproduced with permission from Ref.[217]. Copyright© 2018. American Association for the Advancement of Science); (B) photo-driven biomimetic flower capable of underwater movement. (Reproduced with permission from Ref.[218]. Copyright© 2021. Elsevier); (C) directional locomotion of submillimeter-scale 3D peekytoe crab. (Reproduced with permission from Ref.[219]. Copyright© 2022. American Association for the Advancement of Science); (D) a multistate electrical circuit made of magnetic responsive soft material switch. (Reproduced with permission from Ref.[220]. Copyright© 2020. Springer Nature); (E) 3D printed soft robotic walkers composed of 16 interconnected pneumatic actuators. (Reproduced with permission from Ref.[212]. Copyright© 2019. Springer Nature); (F) micro-origami system capable of wing flapping under current stimulation. (Reproduced with permission from Ref.[221]. Copyright© 2020. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (G) magnetic responsive 3D origami machines with various shapes and movements. (Reproduced with permission from Ref.[222]. Copyright© 2022. Springer Nature)
Ning et al. reported a micro-sized complex 3D mechanical framework that integrated multiple, independently addressable piezoelectric thin-film actuators for vibration excitation and precise control through the guided assembly of heterogeneous materials [Figure 8A][217]. This approach combines transfer printing for integrating heterogeneous materials and structural buckling for 2D to 3D geometric transformation to realize complex and hierarchical architectures. In addition, the location of the piezoelectric material and metal layer was optimized to ensure integrity during compression buckling based on quantitative finite element analysis. This study demonstrated the possibility of measuring fluid properties with separated sensitivity to viscosity and density based on multiple 3D vibration modes of piezoelectric microactuators. Xiang et al. reported photo-driven hydrogel actuators that can be used in underwater photo-mechanical applications [Figure 8B][218]. Hydrogels are made of transparent polyurethane, consisting of dynamically covalent crosslinked hexaarylbiimidazole and permanently crosslinked pentaerythritol, and exhibit anisotropic deformation in response to visible light with mechanical stability and repeated utility. As one of the applications of biomimetic actuators, underwater flowers with rapid photo-driven locomotion have been demonstrated. Han et al. reported submillimeter-scale terrestrial robots with complex 3D geometries and multi-material construction, capable of unusual actuation modes on a solid surface
Mechanical/optical meta-materials
Metamaterials are made by periodically arranging metals or dielectric materials that are significantly smaller than the wavelengths of light of electromagnetic waves, or by designing them to have a very sophisticated geometry. Generally, metamaterials exhibit artificial properties that do not exist in nature through methods, where a sub-wavelength metal/dielectric structure resonates with the electric and magnetic fields of incident waves, or by sophisticated design to have excellent mechanical properties. To improve the performance of metamaterials with unique properties, abundant spatial controllability is required, and 3D configurations provide an opportunity to compensate for this deficiency. For example, 2D metamaterials typically have limited controllability of their properties along the z-axis direction, whereas metamaterials composed of 3D architectures not only have controllability over the z-axis[223,224] but also exhibit more functionality and strong non-reciprocal behaviors[225]. In addition, through mechanical deformation or reconfiguration of the 3D assembly constituting these metamaterials, their characteristics can be dramatically improved or tuned according to the purpose. With the development of 3D metamaterials, various devices in imagination can be realized, and metamaterials have high potential applications in various fields. Thus, in this chapter, we review studies on fabricated 3D metamaterials through periodic arrangements of mesostructures or elaborate designs [Figure 9].

Figure 9. (A) Microdomes with helical arch architecture for ultrahigh strength and plasticity. (Reproduced with permission from Ref.[226]. Copyright© 2021. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (B) large array of bent metasurface with chiral enantiomers. (Reproduced with permission from Ref.[227]. Copyright© 2021. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (C) flexible 3D frequency-selective surface attached to a cylindrical surface. (Reproduced with permission from Ref.[57]. Copyright© 2022. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (D) microlattice of the repeating unit cell with alternating Poisson’s ratio. (Reproduced with permission from Ref.[228]. Copyright© 2022. Springer Nature); (E) 3D spiral structures with different angled arcs for optical reconstruction. (Reproduced with permission from Ref.[56]. Copyright© 2021. Springer Nature).
Cheng et al. demonstrated a dome-shaped hierarchical metamaterial with a gradient helical structure and ultrahigh strength and plasticity, inspired by the Pantheon in Rome, which can withstand high loads with low density [Figure 9A][226]. The introduction of the helical arch structure induced a property transition from brittle to ductile and could have high compliance and energy absorption capacity. They demonstrated that their proposed strategy is a promising method to mitigate the instability of ductile materials with the torsional effect of spiral arch domes and to suppress the decay of brittle composite materials through energy dispersion. Pan et al. fabricated a bifunctional chiral metasurface with giant asymmetric chirality in the
Micro-fluidic system
Microfluidic engineering is a technology that can handle a small amount of fluid using microchannels (typically tens to hundreds of microns) and has been applied to various fields, including lap-on chips, drug delivery systems, and biopharmaceuticals[229-231]. For further advances in microfluidic technology, extending microfluidic networks from 2D to 3D is considered a promising method for improving fluid manipulation performance such as high-efficiency mixing, separation, and detection. Moreover, complex microfluidic structures in 3D can achieve complexity that is difficult to obtain on the 2D plane; therefore, they are expected to be actively used in biological vascular network simulations, especially for disease model investigation, tissue development, and drug screening[232,233]. Thus far, many methodologies, including mechanical buckling and 3D printing, have been developed to fabricate 3D microfluidics, and this chapter introduces various applications of 3D microfluidic channels with complex structures [Figure 10].

Figure 10. (A) Material flexibility of 3D printed microfluidic devices with minimal feature size. (Reproduced with permission from Ref.[234]. Copyright© 2021. American Chemical Society); (B) bioprinted templates enclosed in GelMA hydrogels and respective microchannels perfused with a fluorescent microbead suspension. (Reproduced with permission from Ref.[235]. Copyright© 2014. The Royal Society of Chemistry); (C) 3D microvascular via omnidirectional printing within a hydrogel matrix. (Reproduced with permission from Ref.[236]. Copyright© 2011. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim); (D) 3D microfluidics in “Umbrella” structure programmed from original shape to a deformed shape under external forces. (Reproduced with permission from Ref.[237]. Copyright© 2022. American Chemical Society); (E) schematic and optical image of the helical pattern of gel fiber template fixed on punctured PDMS. (Reproduced with permission from Ref.[238]. Copyright© 2019. Multidisciplinary Digital Publishing Institute).
Weigel et al. reported the development of microfluidic devices with tunable mechanical properties by integrating accessible 3D printing technology and commercially easy-to-prepare starting materials
CONCLUSION AND OUTLOOK
This review summarizes recent advances in various advanced material systems based on flexible/stretchable 3D structures. The design of 3D systems with flexibility and stretchability beyond conventional planar systems has enabled the exploration of various application options for target geometries with high complexity. As demonstrated by the examples presented in this review paper, these superior material systems with novel capabilities can provide new application concepts in widespread fields ranging from electronics, optoelectronics, energy devices, biomedical devices, sensors, actuators, and metamaterials to microfluidic systems. Although each of the technologies discussed in this article has unique functionality and outstanding performance, there are still areas that can be improved.
First, maintaining the unique functions via 3D geometry depends on structural stability against external stimuli, such as temperature changes, rain, and vibration. Understandably, there are a number of related challenges. Materials that use light to trigger the reconfiguration of 3D structures generally exhibit low thermal stability, so the discovery of active materials that respond only to single stimuli is expected to play an important role in improved mechanical stability. In addition, 3D structures consisting of ultra-thin film scaffolds may have difficulty maintaining their structure in harsh environments. The mechanical stability may be improved by introducing a support layer through methods such as initiated chemical vapor deposition (iCVD). 3D structures made of non-stretchable materials that are affected by vibration or wind will require a high level of energy dispersion in their structural design to resist external forces. There are also several improvements required in terms of applicability. For example, chip-level applications via 3D assembly at the nanoscale have been realized, but devices with high chip integration density have rarely been reported. In addition, the resulting yield and success rate of 3D structure fabrication must be further improved to meet the requirements of device mass production.
In this respect, further advances in 3D structure manufacturing technologies will pave the way for the development of devices with novel functions and improved performance. For 3D printing technologies that provide a high level of geometry control, it will be necessary to expand accessibility to high-performance materials and increase processing speed. Origami and kirigami methods, which operate at high speed under systematic rules, require new schemes to avoid manual intervention that hinders the realization of structural complexity and functionality at the micro and nanoscale. Finally, design capabilities for mapping 3D structures to 2D precursors in mechanically-guided assemblies are in the early stages of development, and design rules for more complex geometries are required. As a result, the application fields for 3D structures with flexibility and stretchability are also expected to expand as the manufacturing technology of 3D structures develops. For example, electronics embedded with 3D structures will create a variety of design opportunities that are lacking in 2D electronics within electrical engineering. In addition, the development of 3D multifunctional devices in the biomedical field will provide opportunities for research and clinical medical device development. These devices will also serve as a growth platform for the development of new research tools enabling material science exploration and discovery. Therefore, developing flexible/stretchable 3D structures will allow for novel research in many fields of study and will lead to unprecedented engineering applications.
The impressive advances outlined in this review will provide a strong incentive for research related to applications that can benefit from or are activated by 3D geometry. Furthermore, the question of how 3D structures can be utilized will shift to how they can be integrated further with various engineering fields, including electrical engineering, mechanical engineering, chemical engineering, cell biology, and biomedical engineering, to open new application areas.
DECLARATIONS
Authors’ contributionsSupervised the overall direction and edited the manuscript: Kim BH
Configured the figure set and wrote the manuscript: Kim JH, Lee SE
Availability of data and materialsNot applicable.
Financial support and sponsorshipThis work was supported by the National Research Foundation of Korea(NRF) grant funded by the Korean government (MSIT) (No. 2022M3H4A1A02046445).
Conflicts of interestAll authors declared that there are no conflicts of interest.
Ethical approval and consent to participateNot applicable.
Consent for publicationNot applicable.
Copyright© The Author(s) 2023.
REFERENCES
1. Aheleroff S, Xu X, Lu Y, et al. IoT-enabled smart appliances under industry 4.0: a case study. Adv Eng Inform 2020;43:101043.
2. Wang XX, Cao WQ, Cao MS, Yuan J. Assembling nano-microarchitecture for electromagnetic absorbers and smart devices. Adv Mater 2020;32:e2002112.
3. Bayoumy K, Gaber M, Elshafeey A, et al. Smart wearable devices in cardiovascular care: where we are and how to move forward. Nat Rev Cardiol 2021;18:581-99.
4. Gao M, Wang P, Jiang L, et al. Power generation for wearable systems. Energy Environ Sci 2021;14:2114-57.
5. Ahn S, Han TH, Maleski K, et al. A 2D titanium carbide MXene flexible electrode for high-efficiency light-emitting diodes. Adv Mater 2020;32:e2000919.
6. Mackanic DG, Chang TH, Huang Z, Cui Y, Bao Z. Stretchable electrochemical energy storage devices. Chem Soc Rev 2020;49:4466-95.
7. Lim K, Han T, Lee T. Engineering electrodes and metal halide perovskite materials for flexible/stretchable perovskite solar cells and light-emitting diodes. Energy Environ Sci 2021;14:2009-35.
8. Qi D, Zhang K, Tian G, Jiang B, Huang Y. Stretchable electronics based on PDMS substrates. Adv Mater 2021;33:e2003155.
9. Wu J, Pang H, Ding L, et al. A lightweight, ultrathin aramid-based flexible sensor using a combined inkjet printing and buckling strategy. Chem Eng J 2021;421:129830.
10. Kadumudi FB, Hasany M, Pierchala MK, et al. The manufacture of unbreakable bionics via multifunctional and self-healing silk-graphene hydrogels. Adv Mater 2021;33:e2100047.
11. Xue Z, Song H, Rogers JA, Zhang Y, Huang Y. Mechanically-guided structural designs in stretchable inorganic electronics. Adv Mater 2020;32:e1902254.
12. Chen Y, Carmichael RS, Carmichael TB. Patterned, flexible, and stretchable silver nanowire/polymer composite films as transparent conductive electrodes. ACS Appl Mater Interf 2019;11:31210-9.
13. Li M, Yang YG, Wang ZK, et al. Perovskite grains embraced in a soft fullerene network make highly efficient flexible solar cells with superior mechanical stability. Adv Mater 2019;31:e1901519.
14. Chen X, Xu G, Zeng G, et al. Realizing ultrahigh mechanical flexibility and > 15% efficiency of flexible organic solar cells via a “welding” flexible transparent electrode. Adv Mater 2020;32:e1908478.
15. Kou Y, Sun K, Luo J, et al. An intrinsically flexible phase change film for wearable thermal managements. Energy Stor Mater 2021;34:508-14.
16. Li WD, Ke K, Jia J, et al. Recent advances in multiresponsive flexible sensors towards E-skin: a delicate design for versatile sensing. Small 2022;18:e2103734.
17. Hu Y, Zheng Z. Progress in textile-based triboelectric nanogenerators for smart fabrics. Nano Energy 2019;56:16-24.
18. Mo X, Zhou H, Li W, et al. Piezoelectrets for wearable energy harvesters and sensors. Nano Energy 2019;65:104033.
19. Lessing J, Glavan AC, Walker SB, Keplinger C, Lewis JA, Whitesides GM. Inkjet printing of conductive inks with high lateral resolution on omniphobic “R(F) paper” for paper-based electronics and MEMS. Adv Mater 2014;26:4677-82.
20. Yu KJ, Yan Z, Han M, Rogers JA. Inorganic semiconducting materials for flexible and stretchable electronics. NPJ Flex Electron 2017:1.
21. Chung HU, Kim BH, Lee JY, et al. Binodal, wireless epidermal electronic systems with in-sensor analytics for neonatal intensive care. Science 2019:363.
23. Xie Z, Avila R, Huang Y, Rogers JA. Flexible and stretchable antennas for biointegrated electronics. Adv Mater 2020;32:e1902767.
24. Kamat AM, Pei Y, Jayawardhana B, Kottapalli AGP. Biomimetic soft polymer microstructures and piezoresistive graphene MEMS sensors using sacrificial metal 3D printing. ACS Appl Mater Interf 2021;13:1094-104.
25. Xu R, Lin YS. Flexible and controllable metadevice using self-assembly MEMS actuator. Nano Lett 2021;21:3205-10.
26. Yang Q, Liu T, Xue Y, et al. Ecoresorbable and bioresorbable microelectromechanical systems. Nat Electron 2022;5:526-38.
27. Zheng X, Kamat AM, Krushynska AO, Cao M, Kottapalli AGP. 3D printed graphene piezoresistive microelectromechanical system sensors to explain the ultrasensitive wake tracking of wavy seal whiskers. Adv Funct Mater 2022;32:2207274.
28. Kim RH, Kim DH, Xiao J, et al. Waterproof AlInGaP optoelectronics on stretchable substrates with applications in biomedicine and robotics. Nat Mater 2010;9:929-37.
30. McCall JG, Kim TI, Shin G, et al. Fabrication and application of flexible, multimodal light-emitting devices for wireless optogenetics. Nat Protoc 2013;8:2413-28.
31. Park G, Chung HJ, Kim K, et al. Immunologic and tissue biocompatibility of flexible/stretchable electronics and optoelectronics. Adv Healthc Mater 2014;3:515-25.
32. Kim TH, Lee CS, Kim S, et al. Fully Stretchable optoelectronic sensors based on colloidal quantum dots for sensing photoplethysmographic signals. ACS Nano 2017;11:5992-6003.
33. Seo HK, Kim H, Lee J, et al. Efficient flexible organic/inorganic hybrid perovskite light-emitting diodes based on graphene anode. Adv Mater 2017;29:1605587.
34. Shin G, Gomez AM, Al-Hasani R, et al. Flexible near-field wireless optoelectronics as subdermal implants for broad applications in optogenetics. Neuron 2017;93:509-521.e3.
35. Jung HH, Song J, Nie S, et al. Thin metallic heat sink for interfacial thermal management in biointegrated optoelectronic devices. Adv Mater Technol 2018;3:1800159.
36. Song E, Chiang CH, Li R, et al. Flexible electronic/optoelectronic microsystems with scalable designs for chronic biointegration. Proc Natl Acad Sci U S A 2019;116:15398-406.
37. Lee H, Jiang Z, Yokota T, Fukuda K, Park S, Someya T. Stretchable organic optoelectronic devices: design of materials, structures, and applications. Mater Sci Eng R Rep 2021;146:100631.
38. Zhou H, Han SJ, Lee HD, et al. Overcoming the limitations of MXene electrodes for solution-processed optoelectronic devices. Adv Mater 2022;34:e2206377.
39. Fukuda K, Sekitani T, Zschieschang U, et al. A 4 V operation, flexible braille display using organic transistors, carbon nanotube actuators, and organic static random-access memory. Adv Funct Mater 2011;21:4019-27.
40. Kim DH, Wang S, Keum H, et al. Thin, flexible sensors and actuators as “instrumented” surgical sutures for targeted wound monitoring and therapy. Small 2012;8:3263-8.
42. Webb RC, Pielak RM, Bastien P, et al. Thermal transport characteristics of human skin measured in vivo using ultrathin conformal arrays of thermal sensors and actuators. PLoS One 2015;10:e0118131.
43. Yu C, Yuan P, Erickson EM, Daly CM, Rogers JA, Nuzzo RG. Oxygen reduction reaction induced pH-responsive chemo-mechanical hydrogel actuators. Soft Matter 2015;11:7953-9.
44. Wehner M, Truby RL, Fitzgerald DJ, et al. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016;536:451-5.
45. Ling Y, Pang W, Li X, et al. Laser-induced graphene for electrothermally controlled, mechanically guided, 3D assembly and human-soft actuators interaction. Adv Mater 2020;32:e1908475.
46. Pang W, Xu S, Wu J, et al. A soft microrobot with highly deformable 3D actuators for climbing and transitioning complex surfaces. Proc Natl Acad Sci U S A 2022;119:e2215028119.
47. Jeong JW, McCall JG, Shin G, et al. Wireless optofluidic systems for programmable in vivo pharmacology and optogenetics. Cell 2015;162:662-74.
48. Choi J, Bandodkar AJ, Reeder JT, et al. Soft, skin-integrated multifunctional microfluidic systems for accurate colorimetric analysis of sweat biomarkers and temperature. ACS Sens 2019;4:379-88.
49. Reeder JT, Choi J, Xue Y, et al. Waterproof, electronics-enabled, epidermal microfluidic devices for sweat collection, biomarker analysis, and thermography in aquatic settings. Sci Adv 2019;5:eaau6356.
50. Baker LB, Model JB, Barnes KA, et al. Skin-interfaced microfluidic system with personalized sweating rate and sweat chloride analytics for sports science applications. Sci Adv 2020:6.
51. Luan H, Zhang Q, Liu TL, et al. Complex 3D microfluidic architectures formed by mechanically guided compressive buckling. Sci Adv 2021;7:eabj3686.
52. Baker LB, Seib MS, Barnes KA, et al. Skin-interfaced microfluidic system with machine learning-enabled image processing of sweat biomarkers in remote settings. Adv. Mater Technol 2022;7:2200249.
53. Kim J, Wu Y, Luan H, et al. A skin-interfaced, miniaturized microfluidic analysis and delivery system for colorimetric measurements of nutrients in sweat and supply of vitamins through the skin. Adv Sci 2022;9:e2103331.
54. Wu Y, Wu M, Vázquez-Guardado A, et al. Wireless multi-lateral optofluidic microsystems for real-time programmable optogenetics and photopharmacology. Nat Commun 2022;13:5571.
55. Bai K, Cheng X, Xue Z, et al. Geometrically reconfigurable 3D mesostructures and electromagnetic devices through a rational bottom-up design strategy. Sci Adv 2020;6:eabb7417.
56. Chen S, Liu Z, Du H, et al. Electromechanically reconfigurable optical nano-kirigami. Nat Commun 2021;12:1299.
57. Fan X, Pan Z, Chen S, Li Y, Zhao Z, Pan T. 3D flexible frequency selective surface with stable electromagnetic transmission properties. Adv. Mater Technol 2022;7:2101316.
58. Sun Y, Choi WM, Jiang H, Huang YY, Rogers JA. Controlled buckling of semiconductor nanoribbons for stretchable electronics. Nat Nanotechnol 2006;1:201-7.
59. Yu C, Duan Z, Yuan P, et al. Electronically programmable, reversible shape change in two- and three-dimensional hydrogel structures (Adv. Mater. 11/2013). Adv Mater 2013;25:1540-1540.
60. McCracken JM, Xu S, Badea A, et al. Deterministic integration of biological and soft materials onto 3D microscale cellular frameworks. Adv Biosyst 2017;1:1700068.
61. Zhang Y, Zhang F, Yan Z, et al. Printing, folding and assembly methods for forming 3D mesostructures in advanced materials. Nat Rev Mater 2017:2.
62. Kim BH, Liu F, Yu Y, et al. Mechanically guided post-assembly of 3D electronic systems. Adv Funct Mater 2018;28:1803149.
63. Cheng X, Zhang Y. Micro/nanoscale 3D assembly by rolling, folding, curving, and buckling approaches. Adv Mater 2019;31:e1901895.
64. Li S, Han M, Rogers JA, Zhang Y, Huang Y, Wang H. Mechanics of buckled serpentine structures formed via mechanics-guided, deterministic three-dimensional assembly. J Mech Phys Solids 2019;125:736-48.
65. Nan K, Wang H, Ning X, et al. Soft three-dimensional microscale vibratory platforms for characterization of nano-thin polymer films. ACS Nano 2019;13:449-57.
66. Lim S, Luan H, Zhao S, et al. Assembly of foldable 3D microstructures using graphene hinges. Adv Mater 2020;32:e2001303.
67. Zhao H, Lee Y, Han M, et al. Nanofabrication approaches for functional three-dimensional architectures. Nano Today 2020;30:100825.
68. Park Y, Chung TS, Lee G, Rogers JA. Materials chemistry of neural interface technologies and recent advances in three-dimensional systems. Chem Rev 2022;122:5277-316.
69. Yoon HJ, Lee G, Kim JT, et al. Biodegradable, three-dimensional colorimetric fliers for environmental monitoring. Sci Adv 2022;8:eade3201.
70. Zhang Y, Xu S, Fu H, et al. Buckling in serpentine microstructures and applications in elastomer-supported ultra-stretchable electronics with high areal coverage. Soft Matter 2013;9:8062-70.
71. Xu S, Yan Z, Jang KI, et al. Materials science. Assembly of micro/nanomaterials into complex, three-dimensional architectures by compressive buckling. Science 2015;347:154-9.
72. Huang S, Liu Y, Guo CF, Ren Z. A highly stretchable and fatigue-free transparent electrode based on an in-plane buckled au nanotrough network. Adv Electron Mater 2017;3:1600534.
73. Ning X, Wang H, Yu X, et al. Three-dimensional multiscale, multistable, and geometrically diverse microstructures with tunable vibrational dynamics assembled by compressive buckling. Adv Funct Mater 2017;27:1605914.
74. Li H, Wang X, Zhu F, et al. Viscoelastic characteristics of mechanically assembled three-dimensional structures formed by compressive buckling. J Appl Mech 2018;85:121002.
75. Wang H, Ning X, Li H, et al. Vibration of mechanically-assembled 3D microstructures formed by compressive buckling. J Mech Phys Solids 2018;112:187-208.
76. Ahn BY, Shoji D, Hansen CJ, Hong E, Dunand DC, Lewis JA. Printed origami structures. Adv Mater 2010;22:2251-4.
77. Shi Y, Zhang F, Nan K, et al. Plasticity-induced origami for assembly of three dimensional metallic structures guided by compressive buckling. Extreme Mech Lett 2017;11:105-10.
78. Li C, Xue Y, Han M, et al. Synergistic photoactuation of bilayered spiropyran hydrogels for predictable origami-like shape change. Matter 2021;4:1377-90.
79. Lamoureux A, Lee K, Shlian M, Forrest SR, Shtein M. Dynamic kirigami structures for integrated solar tracking. Nat Commun 2015;6:8092.
80. Neville RM, Scarpa F, Pirrera A. Shape morphing kirigami mechanical metamaterials. Sci Rep 2016;6:31067.
81. Humood M, Shi Y, Han M, et al. Fabrication and deformation of 3D multilayered kirigami microstructures. Small 2018;14:e1703852.
82. Zheng M, Chen Y, Liu Z, et al. Kirigami-inspired multiscale patterning of metallic structures via predefined nanotrench templates. Microsyst Nanoeng 2019;5:54.
83. Bashandeh K, Humood M, Lee J, et al. The effect of defects on the cyclic behavior of polymeric 3D kirigami structures. Extreme Mech Lett 2020;36:100650.
84. Guo X, Ni X, Li J, et al. Designing mechanical metamaterials with kirigami-inspired, hierarchical constructions for giant positive and negative thermal expansion. Adv Mater 2021;33:e2004919.
85. Dogan E, Bhusal A, Cecen B, Miri AK. 3D printing metamaterials towards tissue engineering. Appl Mater Today 2020;20:100752.
86. Xiong Z, Li M, Hao S, et al. 3D-printing damage-tolerant architected metallic materials with shape recoverability via special deformation design of constituent material. ACS Appl Mater Interf 2021;13:39915-24.
87. Okutani C, Yokota T, Miyazako H, Someya T. 3D printed spring-type electronics with liquid metals for highly stretchable conductors and inductive strain/pressure sensors. Adv Mater Technol 2022;7:2101657.
88. Yoon J, Li L, Semichaevsky AV, et al. Flexible concentrator photovoltaics based on microscale silicon solar cells embedded in luminescent waveguides. Nat Commun 2011;2:343.
89. Guo CF, Lan Y, Sun T, Ren Z. Deformation-induced cold-welding for self-healing of super-durable flexible transparent electrodes. Nano Energy 2014;8:110-7.
90. Dagdeviren C, Joe P, Tuzman OL, et al. Recent progress in flexible and stretchable piezoelectric devices for mechanical energy harvesting, sensing and actuation. Extreme Mech Lett 2016;9:269-81.
91. Hong S, Lee J, Do K, et al. Stretchable electrode based on laterally combed carbon nanotubes for wearable energy harvesting and storage devices. Adv Funct Mater 2017;27:1704353.
92. Nan K, Kang SD, Li K, et al. Compliant and stretchable thermoelectric coils for energy harvesting in miniature flexible devices. Sci Adv 2018;4:eaau5849.
93. Liu R, Takakuwa M, Li A, et al. An efficient ultra-flexible photo-charging system integrating organic photovoltaics and supercapacitors. Adv Energy Mater 2020;10:2000523.
94. Sheng H, Zhang X, Liang J, et al. Recent advances of energy solutions for implantable bioelectronics. Adv Healthc Mater 2021;10:e2100199.
95. Jiang F, Zhou X, Lv J, et al. Stretchable, breathable, and stable lead-free perovskite/polymer nanofiber composite for hybrid triboelectric and piezoelectric energy harvesting. Adv Mater 2022;34:e2200042.
96. Fang H, Yu KJ, Gloschat C, et al. Capacitively coupled arrays of multiplexed flexible silicon transistors for long-term cardiac electrophysiology. Nat Biomed Eng 2017;1:0038.
97. Bai W, Yang H, Ma Y, et al. Flexible transient optical waveguides and surface-wave biosensors constructed from monocrystalline silicon. Adv Mater 2018;30:e1801584.
98. Wang C, Li X, Hu H, et al. Monitoring of the central blood pressure waveform via a conformal ultrasonic device. Nat Biomed Eng 2018;2:687-95.
99. Yu X, Wang H, Ning X, et al. Needle-shaped ultrathin piezoelectric microsystem for guided tissue targeting via mechanical sensing. Nat Biomed Eng 2018;2:165-72.
100. Bandodkar AJ, Lee SP, Huang I, et al. Sweat-activated biocompatible batteries for epidermal electronic and microfluidic systems. Nat Electron 2020;3:554-62.
101. Kim S, Lee B, Reeder JT, et al. Soft, skin-interfaced microfluidic systems with integrated immunoassays, fluorometric sensors, and impedance measurement capabilities. Proc Natl Acad Sci U S A 2020;117:27906-15.
102. Choi J, Chen S, Deng Y, et al. Skin-interfaced microfluidic systems that combine hard and soft materials for demanding applications in sweat capture and analysis. Adv Healthc Mater 2021;10:e2000722.
103. Liang Q, Hahn SK, Rogers JA. Advanced materials and devices for medical applications. APL Materials 2021;9:090401.
104. Ryu H, Seo MH, Rogers JA. Bioresorbable metals for biomedical applications: from mechanical components to electronic devices. Adv Healthc Mater 2021;10:e2002236.
105. Yang Q, Wei T, Yin RT, et al. Photocurable bioresorbable adhesives as functional interfaces between flexible bioelectronic devices and soft biological tissues. Nat Mater 2021;20:1559-70.
106. Nguyen TK, Yadav S, Truong TA, et al. Integrated, transparent silicon carbide electronics and sensors for radio frequency biomedical therapy. ACS Nano 2022;16:10890-903.
107. Tian L, Li Y, Webb RC, et al. Flexible and stretchable 3ω sensors for thermal characterization of human skin. Adv Funct Mater 2017;27:1701282.
108. Guo X, Wang X, Ou D, et al. Controlled mechanical assembly of complex 3D mesostructures and strain sensors by tensile buckling. NPJ Flex Electron 2018:2.
109. Kim SB, Lee K, Raj MS, et al. Soft, skin-interfaced microfluidic systems with wireless, battery-free electronics for digital, real-time tracking of sweat loss and electrolyte composition. Small 2018;14:e1802876.
110. Bandodkar AJ, Gutruf P, Choi J, et al. Battery-free, skin-interfaced microfluidic/electronic systems for simultaneous electrochemical, colorimetric, and volumetric analysis of sweat. Sci Adv 2019;5:eaav3294.
111. Bai N, Wang L, Wang Q, et al. Graded intrafillable architecture-based iontronic pressure sensor with ultra-broad-range high sensitivity. Nat Commun 2020;11:209.
112. Fu M, Zhang J, Jin Y, Zhao Y, Huang S, Guo CF. A highly sensitive, reliable, and high-temperature-resistant flexible pressure sensor based on ceramic nanofibers. Adv Sci 2020;7:2000258.
113. Ryu D, Kim DH, Price JT, et al. Comprehensive pregnancy monitoring with a network of wireless, soft, and flexible sensors in high- and low-resource health settings. Proc Natl Acad Sci U S A 2021:118.
114. Zhao H, Kim Y, Wang H, et al. Compliant 3D frameworks instrumented with strain sensors for characterization of millimeter-scale engineered muscle tissues. Proc Natl Acad Sci U S A 2021:118.
115. Bai N, Wang L, Xue Y, et al. Graded interlocks for iontronic pressure sensors with high sensitivity and high linearity over a broad range. ACS Nano 2022;16:4338-47.
116. Zhao C, Wang Y, Tang G, et al. Ionic flexible sensors: mechanisms, materials, structures, and applications. Adv Funct Mater 2022;32:2110417.
117. Chanda D, Shigeta K, Gupta S, et al. Large-area flexible 3D optical negative index metamaterial formed by nanotransfer printing. Nat Nanotechnol 2011;6:402-7.
118. Silverberg JL, Evans AA, McLeod L, et al. Applied origami. Using origami design principles to fold reprogrammable mechanical metamaterials. Science 2014;345:647-50.
119. Eidini M, Paulino GH. Unraveling metamaterial properties in zigzag-base folded sheets. Sci Adv 2015;1:e1500224.
120. Zhang H, Wu J, Fang D, Zhang Y. Hierarchical mechanical metamaterials built with scalable tristable elements for ternary logic operation and amplitude modulation. Sci Adv 2021:7.
122. Valentine AD, Busbee TA, Boley JW, et al. Hybrid 3D printing of soft electronics. Adv Mater 2017;29:1703817.
123. Lin R, Li Y, Mao X, Zhou W, Liu R. Hybrid 3D printing all-in-one heterogenous rigidity assemblies for soft electronics. Adv Mater Technol 2019;4:1900614.
124. Goh GL, Zhang H, Chong TH, Yeong WY. 3D printing of multilayered and multimaterial electronics: a review. Adv Electron Mater 2021;7:2100445.
125. Aditya Khatokar J, Vinay N, Sudhir Bale A, et al. A study on improved methods in micro-electromechanical systems technology. Mater Today Proc 2021;43:3784-90.
126. Hassanin H, Sheikholeslami G, Sareh P, Ishaq RB. Microadditive manufacturing technologies of 3D microelectromechanical systems. Adv Eng Mater 2021;23:2100422.
127. Martyniuk M, Silva KKMBD, Putrino G, et al. Optical microelectromechanical systems technologies for spectrally adaptive sensing and imaging. Adv Funct Mater 2022;32:2103153.
128. Chircov C, Grumezescu AM. Microelectromechanical systems (MEMS) for biomedical applications. Micromachines 2022;13:164.
129. Ren Z, Chang Y, Ma Y, Shih K, Dong B, Lee C. Leveraging of MEMS technologies for optical metamaterials applications. Adv Optical Mater 2020;8:1900653.
130. Koene I, Viitala R, Kuosmanen P. Internet of things based monitoring of large rotor vibration with a microelectromechanical systems accelerometer. IEEE Access 2019;7:92210-9.
131. Gao L, Zhang Y, Zhang H, et al. Optics and nonlinear buckling mechanics in large-area, highly stretchable arrays of plasmonic nanostructures. ACS Nano 2015;9:5968-75.
132. Liu Y, Yan Z, Lin Q, et al. Guided formation of 3D helical mesostructures by mechanical buckling: analytical modeling and experimental validation. Adv Funct Mater 2016;26:2909-18.
133. Nan K, Luan H, Yan Z, et al. Engineered elastomer substrates for guided assembly of complex 3D mesostructures by spatially nonuniform compressive buckling. Adv Funct Mater 2017;27:1604281.
134. Shi Y, Pei P, Cheng X, et al. An analytic model of two-level compressive buckling with applications in the assembly of free-standing 3D mesostructures. Soft Matter 2018;14:8828-37.
135. Zhao H, Li K, Han M, et al. Buckling and twisting of advanced materials into morphable 3D mesostructures. Proc Natl Acad Sci U S A 2019;116:13239-48.
136. Zhang Y, Yan Z, Nan K, et al. A mechanically driven form of kirigami as a route to 3D mesostructures in micro/nanomembranes. Proc Natl Acad Sci U S A 2015;112:11757-64.
138. Ning X, Wang X, Zhang Y, et al. Assembly of advanced materials into 3D functional structures by methods inspired by origami and kirigami: a review. Adv Mater Interf 2018;5:1800284.
139. Abdullah AM, Li X, Braun PV, Rogers JA, Hsia KJ. Kirigami-inspired self-assembly of 3D structures. Adv Funct Mater 2020;30:1909888.
140. Bashandeh K, Lee J, Wu Q, et al. Mechanics and deformation of shape memory polymer kirigami microstructures. Extreme Mech Lett 2020;39:100831.
141. Yan Z, Zhang F, Wang J, et al. Controlled mechanical buckling for origami-inspired construction of 3D microstructures in advanced materials. Adv Funct Mater 2016;26:2629-39.
142. Chung HU, Rwei AY, Hourlier-Fargette A, et al. Skin-interfaced biosensors for advanced wireless physiological monitoring in neonatal and pediatric intensive-care units. Nat Med 2020;26:418-29.
143. Fu H, Nan K, Bai W, et al. Morphable 3D mesostructures and microelectronic devices by multistable buckling mechanics. Nat Mater 2018;17:268-76.
144. Zhang L, Zhang Z, Weisbecker H, et al. 3D morphable systems via deterministic microfolding for vibrational sensing, robotic implants, and reconfigurable telecommunication. Sci Adv 2022;8:eade0838.
145. Chen Z, Kong S, He Y, et al. Soft, bistable actuators for reconfigurable 3D electronics. ACS Appl Mater Interf 2021;13:41968-77.
146. Humood M, Lefebvre J, Shi Y, et al. Fabrication and mechanical cycling of polymer microscale architectures for 3D MEMS sensors. Adv Eng Mater 2019;21:1801254.
147. Liu F, Chen Y, Song H, et al. High performance, tunable electrically small antennas through mechanically guided 3D assembly. Small 2019;15:e1804055.
148. Sim K, Rao Z, Li Y, Yang D, Yu C. Curvy surface conformal ultra-thin transfer printed Si optoelectronic penetrating microprobe arrays. NPJ Flex Electron 2018:2.
149. Ko HC, Stoykovich MP, Song J, et al. A hemispherical electronic eye camera based on compressible silicon optoelectronics. Nature 2008;454:748-53.
150. Lee SW, Baek S, Park SW, et al. 3D motion tracking display enabled by magneto-interactive electroluminescence. Nat Commun 2020;11:6072.
151. Rao Z, Lu Y, Li Z, et al. Curvy, shape-adaptive imagers based on printed optoelectronic pixels with a kirigami design. Nat Electron 2021;4:513-21.
152. Mawlong LPL, Ahn J. 3D-structured photodetectors based on 2D transition-metal dichalcogenide. Small Struct 2022;3:2100149.
153. Kim J, Salvatore GA, Araki H, et al. Battery-free, stretchable optoelectronic systems for wireless optical characterization of the skin. Sci Adv 2016;2:e1600418.
154. Kang S, Lee HE, Wang HS, et al. Self-powered flexible full-color display via dielectric-tuned hybrimer triboelectric nanogenerators. ACS Energy Lett 2021;6:4097-107.
155. Lee Y, Kim BJ, Hu L, Hong J, Ahn J. Morphable 3D structure for stretchable display. Mater Today 2022;53:51-7.
156. Yong K, De S, Hsieh EY, Leem J, Aluru NR, Nam S. Kirigami-inspired strain-insensitive sensors based on atomically-thin materials. Mater Today 2020;34:58-65.
157. Wang X, Guo X, Ye J, et al. Freestanding 3D mesostructures, functional devices, and shape-programmable systems based on mechanically induced assembly with shape memory polymers. Adv Mater 2019;31:e1805615.
158. Lee W, Liu Y, Lee Y, et al. Two-dimensional materials in functional three-dimensional architectures with applications in photodetection and imaging. Nat Commun 2018;9:1417.
159. Kim DC, Yun H, Kim J, et al. Three-dimensional foldable quantum dot light-emitting diodes. Nat Electron 2021;4:671-80.
160. Li Y, Luo C, Yu K, Wang X. Remotely controlled, reversible, on-demand assembly and reconfiguration of 3D mesostructures via liquid crystal elastomer platforms. ACS Appl Mater Interf 2021;13:8929-39.
161. Park Y, Luan H, Kwon K, et al. Transformable, freestanding 3D mesostructures based on transient materials and mechanical interlocking. Adv Funct Mater 2019;29:1903181.
162. Azani M, Hassanpour A, Torres T. Benefits, problems, and solutions of silver nanowire transparent conductive electrodes in indium tin oxide (ITO)‐free flexible solar cells. Adv Energy Mater 2020;10:2002536.
163. Heo S, Kim DH, Song YM, Lee GJ. Determining the effectiveness of radiative cooler-integrated solar cells. Adv Energy Mater 2022;12:2103258.
164. Huang S, Tang L, Najafabadi HS, Chen S, Ren Z. A highly flexible semi-tubular carbon film for stable lithium metal anodes in high-performance batteries. Nano Energy 2017;38:504-9.
165. Lee MH, Lee J, Jung SK, et al. A biodegradable secondary battery and its biodegradation mechanism for eco-friendly energy-storage systems. Adv Mater 2021;33:e2004902.
166. Huang I, Zhang Y, Arafa HM, et al. High performance dual-electrolyte magnesium-iodine batteries that can harmlessly resorb in the environment or in the body. Energy Environ Sci 2022;15:4095-108.
167. Jinno H, Fukuda K, Xu X, et al. Stretchable and waterproof elastomer-coated organic photovoltaics for washable electronic textile applications. Nat Energy 2017;2:780-5.
168. Lu L, Yang Z, Meacham K, et al. Biodegradable monocrystalline silicon photovoltaic microcells as power supplies for transient biomedical implants. Adv Energy Mater 2018;8:1703035.
169. Chu H, Jang H, Lee Y, Chae Y, Ahn J. Conformal, graphene-based triboelectric nanogenerator for self-powered wearable electronics. Nano Energy 2016;27:298-305.
170. Tao K, Yi H, Yang Y, et al. Origami-inspired electret-based triboelectric generator for biomechanical and ocean wave energy harvesting. Nano Energy 2020;67:104197.
171. Gong X, Yang Q, Zhi C, Lee PS. Stretchable energy storage devices: from materials and structural design to device assembly. Adv Energy Mater 2021;11:2003308.
172. Han M, Wang H, Yang Y, et al. Three-dimensional piezoelectric polymer microsystems for vibrational energy harvesting, robotic interfaces and biomedical implants. Nat Electron 2019;2:26-35.
173. Kim YG, Hong S, Hwang B, Ahn SH, Song JH. Improved performance of stretchable piezoelectric energy harvester based on stress rearrangement. Sci Rep 2022;12:19149.
174. Yang C, Wu X, Xia H, et al. 3D printed template-assisted assembly of additive-free Ti3C2Tx MXene microlattices with customized structures toward high areal capacitance. ACS Nano 2022;16:2699-710.
175. Xia X, Afshar A, Yang H, et al. Electrochemically reconfigurable architected materials. Nature 2019;573:205-13.
176. Guo Z, Yu Y, Zhu W, et al. Kirigami-based stretchable, deformable, ultralight thin-film thermoelectric generator for bodynet application. Adv Energy Mater 2022;12:2102993.
177. Miao L, Song Y, Ren Z, et al. 3D temporary-magnetized soft robotic structures for enhanced energy harvesting. Adv Mater 2021;33:e2102691.
178. Ling Y, Zhuang X, Xu Z, et al. Mechanically assembled, three-dimensional hierarchical structures of cellular graphene with programmed geometries and outstanding electromechanical properties. ACS Nano 2018;12:12456-63.
179. Pan Y, Yang Z, Li C, Hassan SU, Shum HC. Plant-inspired TransfOrigami microfluidics. Sci Adv 2022;8:eabo1719.
180. Sim K, Ershad F, Zhang Y, et al. An epicardial bioelectronic patch made from soft rubbery materials and capable of spatiotemporal mapping of electrophysiological activity. Nat Electron 2020;3:775-84.
181. Sempionatto JR, Lin M, Yin L, et al. An epidermal patch for the simultaneous monitoring of haemodynamic and metabolic biomarkers. Nat Biomed Eng 2021;5:737-48.
182. Bai W, Shin J, Fu R, et al. Bioresorbable photonic devices for the spectroscopic characterization of physiological status and neural activity. Nat Biomed Eng 2019;3:644-54.
183. Zhang Y, Mickle AD, Gutruf P, et al. Battery-free, fully implantable optofluidic cuff system for wireless optogenetic and pharmacological neuromodulation of peripheral nerves. Sci Adv 2019;5:eaaw5296.
184. Won SM, Cai L, Gutruf P, Rogers JA. Wireless and battery-free technologies for neuroengineering. Nat Biomed Eng 2023;7:405-23.
185. Wang X, Feiner R, Luan H, et al. Three-dimensional electronic scaffolds for monitoring and regulation of multifunctional hybrid tissues. Extreme Mech Lett 2020;35:100634.
186. Song E, Xie Z, Bai W, et al. Miniaturized electromechanical devices for the characterization of the biomechanics of deep tissue. Nat Biomed Eng 2021;5:759-71.
187. Wang C, Qi B, Lin M, et al. Continuous monitoring of deep-tissue haemodynamics with stretchable ultrasonic phased arrays. Nat Biomed Eng 2021;5:749-58.
188. Han M, Chen L, Aras K, et al. Catheter-integrated soft multilayer electronic arrays for multiplexed sensing and actuation during cardiac surgery. Nat Biomed Eng 2020;4:997-1009.
189. Park Y, Chung TS, Rogers JA. Three dimensional bioelectronic interfaces to small-scale biological systems. Curr Opin Biotechnol 2021;72:1-7.
190. Zhao J, Li W, Guo X, Wang H, Rogers JA, Huang Y. Theoretical modeling of tunable vibrations of three-dimensional serpentine structures for simultaneous measurement of adherent cell mass and modulus. MRS Bulletin 2021;46:107-14.
191. Skylar-Scott MA, Uzel SGM, Nam LL, et al. Biomanufacturing of organ-specific tissues with high cellular density and embedded vascular channels. Sci Adv 2019;5:eaaw2459.
192. Xue Z, Jin T, Xu S, et al. Assembly of complex 3D structures and electronics on curved surfaces. Sci Adv 2022;8:eabm6922.
193. Gu Y, Wang C, Kim N, et al. Three-dimensional transistor arrays for intra- and inter-cellular recording. Nat Nanotechnol 2022;17:292-300.
194. Chen Z, Anandakrishnan N, Xu Y, Zhao R. Compressive buckling fabrication of 3D cell-laden microstructures. Adv Sci 2021;8:e2101027.
195. Yan D, Chang J, Zhang H, et al. Soft three-dimensional network materials with rational bio-mimetic designs. Nat Commun 2020;11:1180.
196. Park Y, Franz CK, Ryu H, et al. Three-dimensional, multifunctional neural interfaces for cortical spheroids and engineered assembloids. Sci Adv 2021:7.
197. Huang Q, Tang B, Romero JC, et al. Shell microelectrode arrays (MEAs) for brain organoids. Sci Adv 2022;8:eabq5031.
198. Lou Z, Wang L, Jiang K, Shen G. Programmable three-dimensional advanced materials based on nanostructures as building blocks for flexible sensors. Nano Today 2019;26:176-98.
199. Zhang F, Jin T, Xue Z, Zhang Y. Recent progress in three-dimensional flexible physical sensors. Int J Smart Nano Mater 2022;13:17-41.
200. Wu S, Peng S, Yu Y, Wang C. Strategies for designing stretchable strain sensors and conductors. Adv Mater Technol 2020;5:1900908.
201. Kim BH, Li K, Kim JT, et al. Three-dimensional electronic microfliers inspired by wind-dispersed seeds. Nature 2021;597:503-10.
202. Goh GL, Agarwala S, Yong WY. 3D printing of microfluidic sensor for soft robots: a preliminary study in design and fabrication. Available from: https://dr.ntu.edu.sg/handle/10356/84409 [Last accessed on 9 May 2023].
203. Truby RL, Wehner M, Grosskopf AK, et al. Soft somatosensitive actuators via embedded 3D printing. Adv Mater 2018;30:e1706383.
204. Peng S, Wang Z, Lin J, et al. Tailored and highly stretchable sensor prepared by crosslinking an enhanced 3D printed UV-curable sacrificial mold. Adv Funct Mater 2021;31:2008729.
205. Won SM, Wang H, Kim BH, et al. Multimodal sensing with a three-dimensional piezoresistive structure. ACS Nano 2019;13:10972-9.
206. Becker C, Bao B, Karnaushenko DD, et al. A new dimension for magnetosensitive e-skins: active matrix integrated micro-origami sensor arrays. Nat Commun 2022;13:2121.
207. Liu J, Jiang S, Xiong W, Zhu C, Li K, Huang Y. Self-healing kirigami assembly strategy for conformal electronics. Adv Funct Mater 2022;32:2109214.
208. Katiyar AK, Thai KY, Yun WS, Lee J, Ahn JH. Breaking the absorption limit of Si toward SWIR wavelength range via strain engineering. Sci Adv 2020;6:eabb0576.
209. Cheng X, Zhang F, Bo R, et al. An anti-fatigue design strategy for 3D ribbon-shaped flexible electronics. Adv Mater 2021;33:e2102684.
210. Wang Y, Li X, Fan S, et al. Three-dimensional stretchable microelectronics by projection microstereolithography (PμSL). ACS Appl Mater Interf 2021;13:8901-8.
211. Zhalmuratova D, Chung H. Reinforced gels and elastomers for biomedical and soft robotics applications. ACS Appl Polym Mater 2020;2:1073-91.
212. Skylar-Scott MA, Mueller J, Visser CW, Lewis JA. Voxelated soft matter via multimaterial multinozzle 3D printing. Nature 2019;575:330-5.
213. Sun Y, Li D, Wu M, et al. Origami-inspired folding assembly of dielectric elastomers for programmable soft robots. Microsyst Nanoeng 2022;8:37.
214. Patel DK, Huang X, Luo Y, et al. Highly dynamic bistable soft actuator for reconfigurable multimodal soft robots. Adv Mater Technol 2023;8:2201259.
215. Keneth E, Kamyshny A, Totaro M, Beccai L, Magdassi S. 3D printing materials for soft robotics. Adv Mater 2021;33:e2003387.
216. Tawk C, Alici G. A review of 3D-printable soft pneumatic actuators and sensors: research challenges and opportunities. Adv Intell Syst 2021;3:2000223.
217. Ning X, Yu X, Wang H, et al. Mechanically active materials in three-dimensional mesostructures. Sci Adv 2018;4:eaat8313.
218. Xiang S, Su Y, Yin H, Li C, Zhu M. Visible-light-driven isotropic hydrogels as anisotropic underwater actuators. Nano Energy 2021;85:105965.
219. Han M, Guo X, Chen X, et al. Submillimeter-scale multimaterial terrestrial robots. Sci Robot 2022;7:eabn0602.
220. Deng H, Sattari K, Xie Y, Liao P, Yan Z, Lin J. Laser reprogramming magnetic anisotropy in soft composites for reconfigurable 3D shaping. Nat Commun 2020;11:6325.
221. Zhu Y, Birla M, Oldham KR, Filipov ET. Elastically and plastically foldable electrothermal micro-origami for controllable and rapid shape morphing. Adv Funct Mater 2020;30:2003741.
222. Yi S, Wang L, Chen Z, et al. High-throughput fabrication of soft magneto-origami machines. Nat Commun 2022;13:4177.
223. Lin Z, Novelino LS, Wei H, et al. Folding at the microscale: enabling multifunctional 3D origami-architected metamaterials. Small 2020;16:e2002229.
224. Xiang X, Fu Z, Zhang S, et al. The mechanical characteristics of graded Miura-ori metamaterials. Mater Des 2021;211:110173.
226. Cheng L, Tang T, Yang H, et al. The twisting of dome-like metamaterial from brittle to ductile. Adv Sci 2021;8:2002701.
227. Pan R, Liu Z, Zhu W, Du S, Gu C, Li J. Asymmetrical chirality in 3D bended metasurface. Adv Funct Mater 2021;31:2100689.
228. Farzaneh A, Pawar N, Portela CM, Hopkins JB. Sequential metamaterials with alternating Poisson’s ratios. Nat Commun 2022;13:1041.
229. Zhong Q, Ding H, Gao B, He Z, Gu Z. Advances of microfluidics in biomedical engineering. Adv Mater Technol 2019;4:1800663.
230. Nielsen JB, Hanson RL, Almughamsi HM, Pang C, Fish TR, Woolley AT. Microfluidics: innovations in materials and their fabrication and functionalization. Anal Chem 2020;92:150-68.
232. Fallahi H, Zhang J, Phan HP, Nguyen NT. Flexible microfluidics: fundamentals, recent developments, and applications. Micromachines 2019;10:830.
233. Mehta V, Rath SN. 3D printed microfluidic devices: a review focused on four fundamental manufacturing approaches and implications on the field of healthcare. Bio-des Manuf 2021;4:311-43.
234. Weigel N, Männel MJ, Thiele J. Flexible materials for high-resolution 3D printing of microfluidic devices with integrated droplet size regulation. ACS Appl Mater Interf 2021;13:31086-101.
235. Bertassoni LE, Cecconi M, Manoharan V, et al. Hydrogel bioprinted microchannel networks for vascularization of tissue engineering constructs. Lab Chip 2014;14:2202-11.
236. Wu W, DeConinck A, Lewis JA. Omnidirectional printing of 3D microvascular networks. Adv Mater 2011;23:H178-83.
237. Wang Z, Jiang H, Wu G, et al. Shape-programmable three-dimensional microfluidic structures. ACS Appl Mater Interf 2022;14:15599-607.
238. Ng PF, Lee KI, Yang M, Fei B. Fabrication of 3D PDMS microchannels of adjustable cross-sections via versatile gel templates. Polymers 2019;11:64.
239. Zhai Z, Wu L, Jiang H. Mechanical metamaterials based on origami and kirigami. Applied Physics Reviews 2021;8:041319.
Cite This Article
Export citation file: BibTeX | RIS
OAE Style
Kim JH, Lee SE, Kim BH. Applications of flexible and stretchable three-dimensional structures for soft electronics. Soft Sci 2023;3:16. http://dx.doi.org/10.20517/ss.2023.07
AMA Style
Kim JH, Lee SE, Kim BH. Applications of flexible and stretchable three-dimensional structures for soft electronics. Soft Science. 2023; 3(2): 16. http://dx.doi.org/10.20517/ss.2023.07
Chicago/Turabian Style
Kim, Jang Hwan, Su Eon Lee, Bong Hoon Kim. 2023. "Applications of flexible and stretchable three-dimensional structures for soft electronics" Soft Science. 3, no.2: 16. http://dx.doi.org/10.20517/ss.2023.07
ACS Style
Kim, JH.; Lee SE.; Kim BH. Applications of flexible and stretchable three-dimensional structures for soft electronics. Soft. Sci. 2023, 3, 16. http://dx.doi.org/10.20517/ss.2023.07
About This Article
Special Issue
Copyright

Data & Comments
Data


 Cite This Article 27 clicks
Cite This Article 27 clicks

 Like This Article 2
likes
Like This Article 2
likes








Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at support@oaepublish.com.